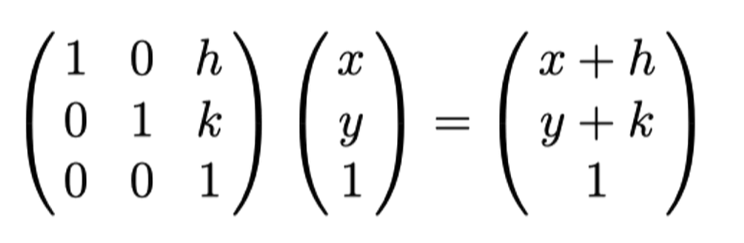
Translations of points in does not correspond directly to a linear transform. Homogeneous coordinates are used to model translations using matrix multiplication.
Homogeneous Coordinates in
Each point in can be identified with the point , , on the plane in that lies units above the -plane.
can be represented by,
Now rotate a triangle () by radians counterclockwise about the point .
This give us the points,
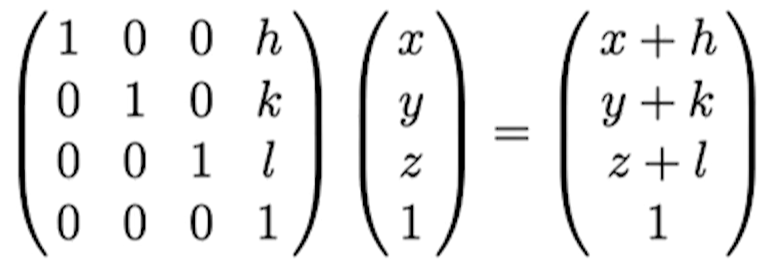
In
So, can be represented by,
Rotation in
about -axis by rads. To find . We can find as . We can similarly find all the columns of .
Projection
Onto the plane What should we do?
- Shift everything down by 4 (Homogeneous Coordinates)
- Apply the projection (Homogeneous Coordinates)
- Shift everything back up by 4 (Homogeneous Coordinates) Amusing a vector ,
You could drive the matrix but that is trivial and left as an exercise to the reader.